 |
| Pololu gearmotor |
Speaking to previous years competitors and looking at bots from the antweight world series, I was shown to a range of micrometal gearmotors which could give out a very high amount of torque for the size of the motors. I decided to use one of these motors however the exact gear ratio would be decided upon later.
With this in mind, I made my first design on Sketchup. Google Sketchup conveniently has a 3-d warehouse where you can download models made by other people. These are often to scale so really helped save time when making this initial design. Both a servo and the gearmotors had been modelled before by other people so I could download them and add them to the design.
With that in mind I had my first initial design:
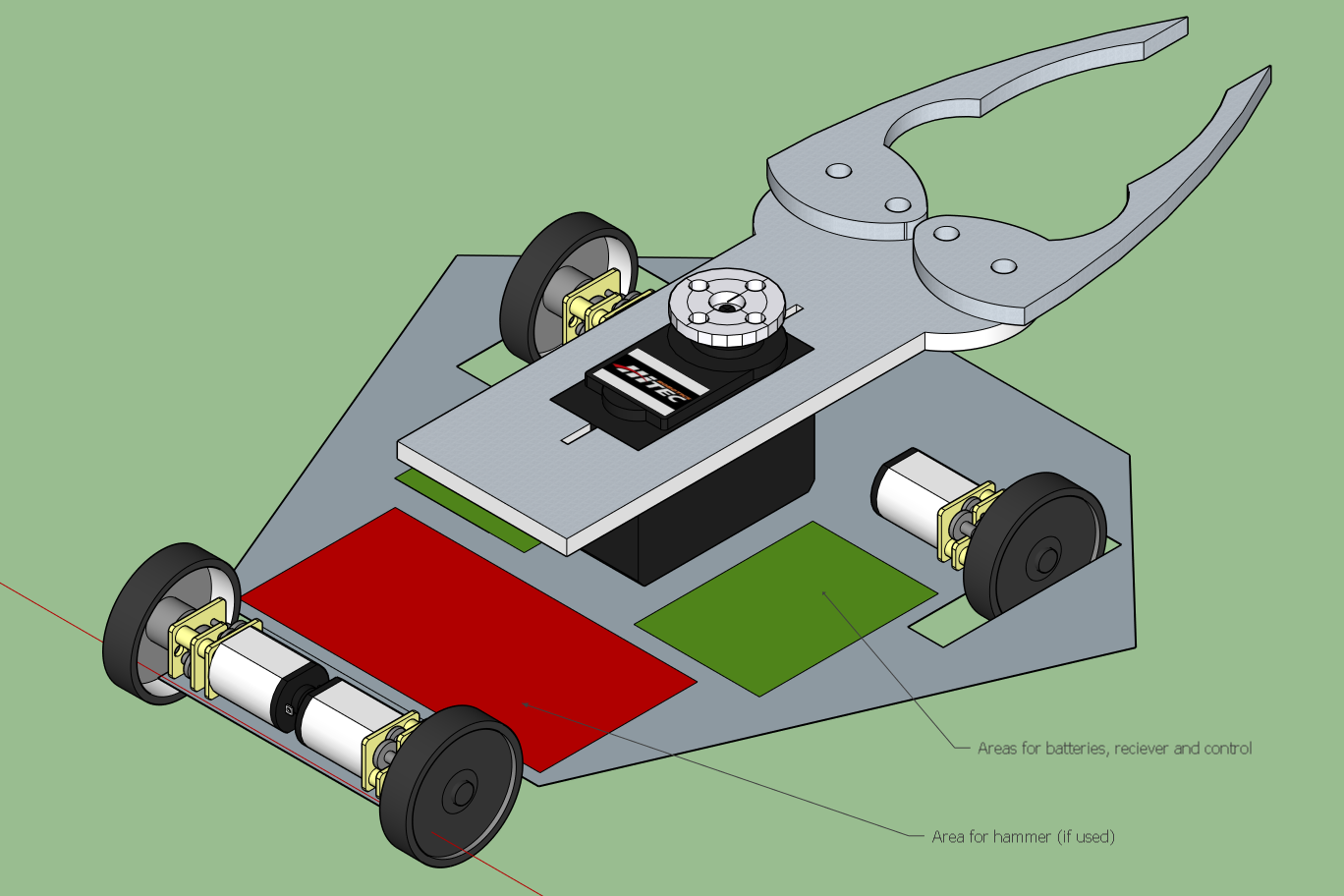
This lead me on to my next design, which also incorporates a pneumatic hammer, which I will discuss in my next blog post.

No comments:
Post a Comment