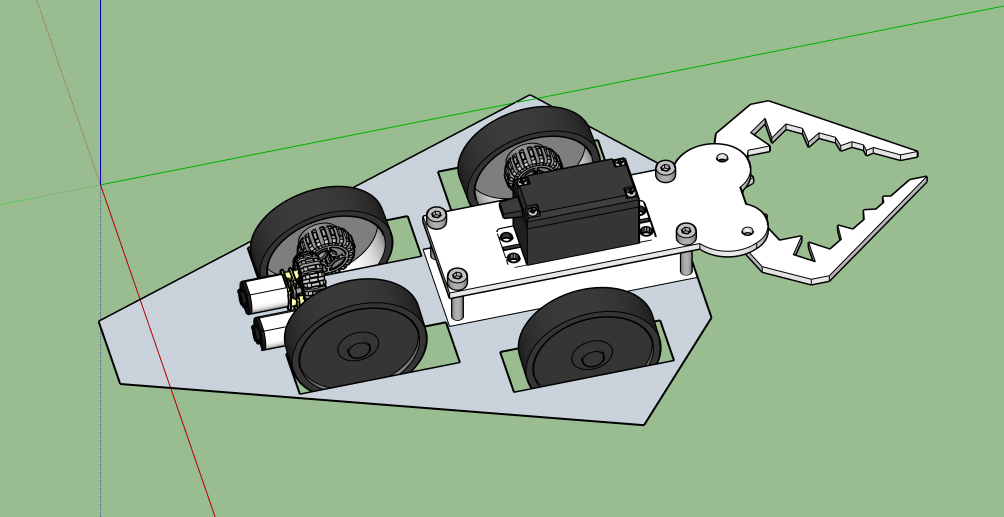
With parts ordered and knowing their dimensions from data sheets, I am now in the process of designing the complete model on Google Sketchup. I have been having a few issues with fitting the motors in sideways as it has been making the robot too wide if I wanted to keep the same kind of shape (wide at the front then getting narrower). I was then told about bevel gears. These transmit rotary motion 90 degrees. This has meant I can place my rear motors in line with the front of the robot and help keep it thinner.
The bevel gears I have used lego gears for ease, although these can be changed to metal at a later date
The claw has also been redesigned to be more scorpion like and scarier.
No comments:
Post a Comment